第一章 全球卫星导航系统简介
都是一些概念:
- 全球导航卫星系统(GNSS, Global Navigation Satellite System)。它是泛指所有的卫星导航系统,包括美国GPS、俄罗斯GLONASS、欧洲Galileo、中国BDS等全球卫星导航系统,印度NAVIC和日本QZSS等区域卫星导航系统,以及美国WAAS(广域增强系统)、欧洲EGNOS(欧洲静地导航重叠系统)等增强系统,同时还涵盖了在建和以后要建设的其他卫星导航系统。
- GNSS基本组成:用户段--空间段--地面段
- GPS:目前GPS星座有35颗在轨卫星,其中PRN号4、11、14、18、23共5颗Block III即为GPS IIIA卫星。根据2019年12月全球卫星导航系统国际委员会(ICG)第十四届大会美国公布的数据,2019年GPS卫星的空间信号精度约为0.5米。
- BDS:与其他GNSS相对单一的轨道不同的是,北斗系统是由GEO卫星、IGSO卫星和MEO卫星三种轨道卫星组成的混合导航星座。由24颗MEO、3颗IGSO和3颗GEO卫星组成。
第二章 导航信号基本理论
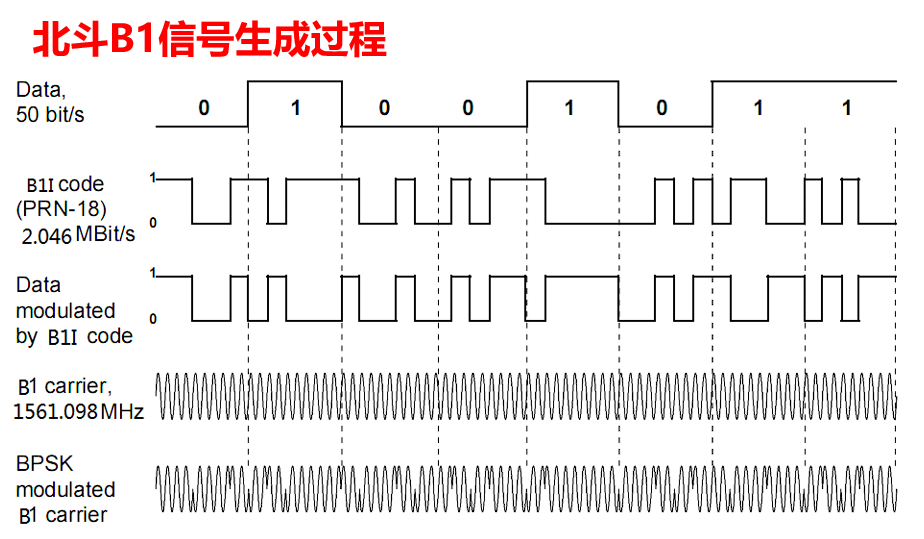
- 卫星导航信号主要由载波、测距码和导航电文三部分组成,这三部分通过特定形式调制在一起。简单的可描述为导航电文首先和测距码用模2加的方法组合,合成的二进制信号再调制载波上,形成中频或者是射频信号。
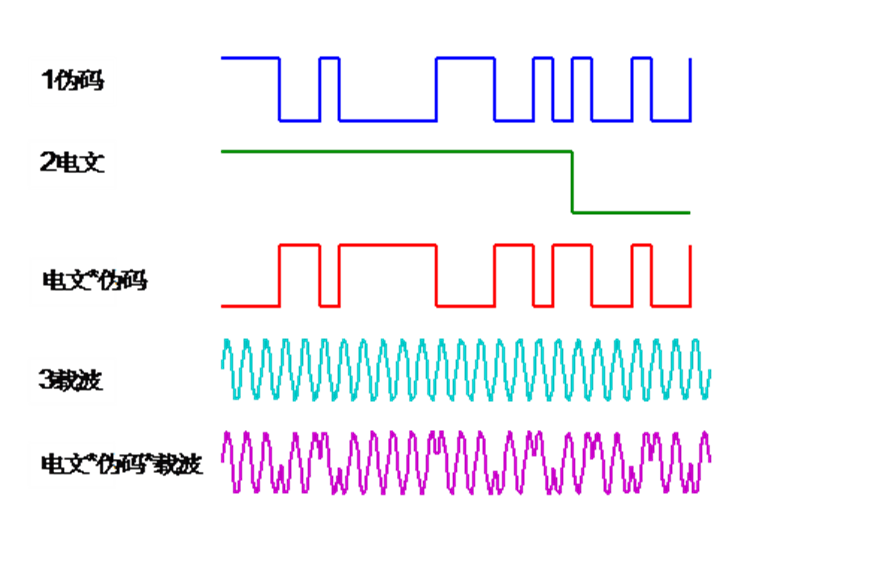
- 载波(carrier wave, carrier signal或carrier)是由振荡器产生并在信道上传输的电波,被调制后用来传送语音或其它信息。载波频率通常比输入信号的频率高,属于高频信号,输入信号调制到一个高频载波上,然后再被发射和接收。载波是传送信息(话音和数据)的物理基础和承载工具。
- 为什么通信要通过载波:如果通过低频信号传递信息,那么会导致无线天线尺寸过大(1/4波长)、抗干扰能力差、无法实现多路通信。
- 测距码(伪码,PRN:Pseudo Random Noise)是用以测定从卫星至接收机间的距离的一种二进制编码序列,是一种伪随机噪声码。在导航应用中,导航信息(电文)被调制在测距码上。测距码不仅区分不同卫星,也可用于测量每颗可视卫星信号的精确到达时间。
- 卫星导航电文是由导航卫星播发给用户的描述导航卫星运行状态参数的信息,导航电文携带信息内容包括:本卫星基本导航信息(整周计数、用户距离精度指数、钟差参数、星历数据龄期及参数、电离层模型参数等)、卫星历书信息(卫星健康信息、历书参数及历书周计数)、与其它系统时间同步信息、差分及完好性信息、格网点电离层信息等。导航电文的参数给用户提供了时间信息,利用导航电文参数可以计算用户的位置坐标和速度。
- 多路复用:将多路导航信号按照功率、性能损失最小的方式调制到同一个载频点上;复用方式:线性相加、恒包络复用;恒包络复用技术:正交复用、Interplex复用、最优相位复用。
第三章 导航信号空间传播特性和误差分布
- 空间环境对导航信号传播的影响:大气层对导航信号的影响主要存在于电离层和对流层。由于电离层存在大量的电离粒子,因此导航信号进入电离层会产生折射和色散,而对流层存在较多的云和水汽,也会对导航信号产生影响。
第四章 导航信号的设计验证
- 信号捕获:接收机估算出接收信号的载波频率和码相位值,作为跟踪环路的初始化参数,是一个三维搜索的过程,三个纬度分别是频率、码相位、伪码。
- 信号跟踪:GPS卫星信号是动态变化的,多普勒效应会引起载波频率发生动态偏移;伪随机码起始时间会随着卫星与接收机间距离的变化而变化。
第五章 GNSS接收机原理与构成
- GNSS接收机概念:一种能够接收、跟踪、变换和测量卫星导航定位信号的无线电接收设备,能够提供位置、速度、时间信号和信息。
*
- RNSS:Radio Navigation Satellite System,卫星无线电导航业务,由用户接收卫星无线电导航信号,自主完成至少到4颗卫星的距离测量,进行用户位置,速度及航行参数计算。GPS、GLONASS、GALILE0、北斗二代(部分)、北斗三代(部分)等系统是典型的RNSS系统。(only接收)
- RNSS定位原理:解四个方程需要四个参量,分别是三维+钟差。
- RDSS:Radio Determination Satellite Service,卫星无线电测定业务,用户至卫星的距离测量和位置计算无法由用户自身独立完成必须由导航系统通过用户的应答来完成。我国北斗一代系统的特色北斗二代、北斗三代保留了RDSS。(接收+发射)
- GNSS接收机发展趋势:发展趋势:多系统兼容、GNSS与移动通信融合、导航通信一体化、系统内嵌式高精度定位、服务消息认证(OS-NMA)。
第六章 导航接收机变频链特征
- 天线:天线是一种用来发射或者接收电磁波的器件;发射天线的作 用是将发射机的高频电流(或波导系统中的导行波)的能量有效 地转换成空间的电磁能量。而接收天线的作用则恰恰相反。因此 天线实际上是一个换能器。
- 天线增益:用来衡量天线朝一个特定方向收发信号的能力,方向 图主瓣越窄,副瓣越小,增益越高。
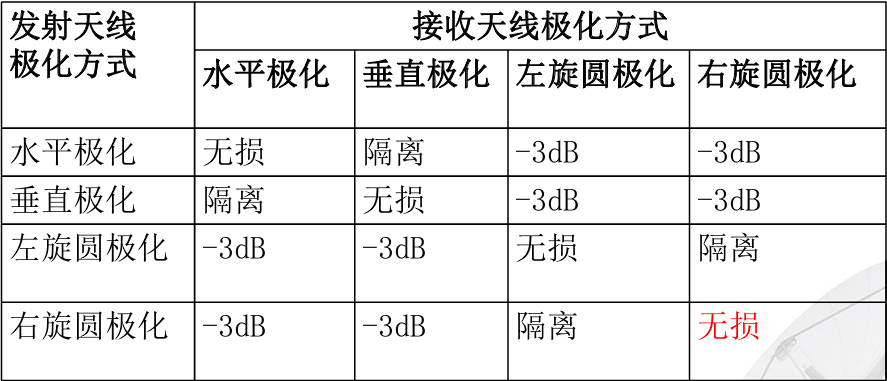
- 极化:无线电波在空间传播时,其电场方向是按一定的规律而变化的,这种现象称为无线电波的极化。无线电波的电场方向称为电波的极化方向。如果电波的电场方向垂直于地面,我们就称它为垂直极化波。如果电波的电场方向与地面平行,则称它为水平极化波。
- 圆极化波:电波在传播过程中电场的方向是旋转的,旋转过程中,电场的幅度,即大小保持不变,称之为圆极化波 。
- 当来波的极化方向与接收天线的极化方向不一致时,在 接收过程中通常都要产生极化损失,例如:当用圆极化天线 接收任一线极化波,或用线极化天线接收任一圆极化波时, 都要产生3dB的极化损失,即只能接收到来波的一半能量;
- 互易定理:一般天线都具有可逆性,即同一副天线既可用作 发射天线,也可用作接收天线。同一天线作为发射或接收的 基本特性参数是相同的。
- 相位中心指:微波天线的电气中心,是辐射信号的有效采集点。相 位中心是接收机伪距、载波相位测量的实际参考点;
第七章 GNSS接收机原理与构成
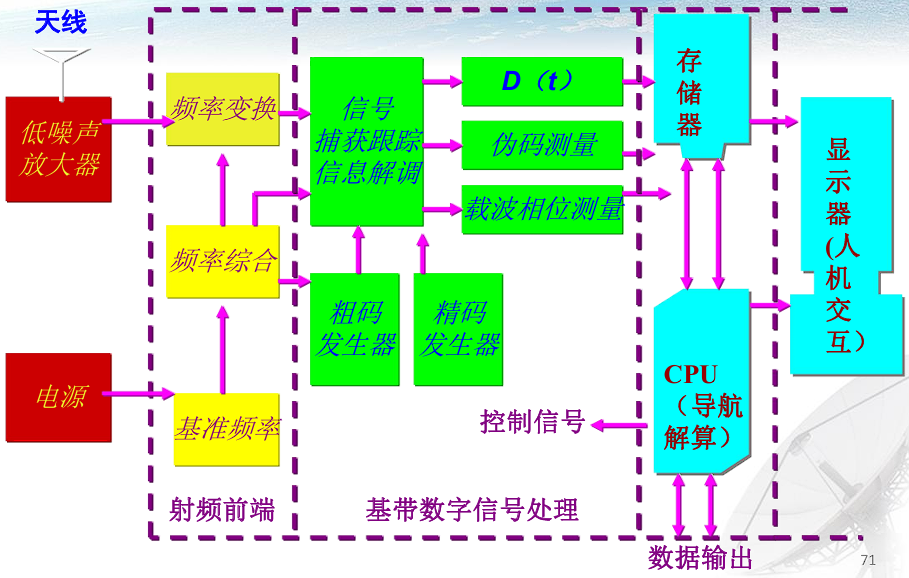
- 射频前端:主要是把从低噪放输出的射频信号进行下变频、滤波、放大,变换成合适的中频信号给基带信号处理模块。模块应该包含下列主要功能:信号放大、射频至中频的变频与滤波、本地频率综合、低噪放的供电、AGC 、AD转换
- 基带数字信号处理:接收经过射频模块下变频的中频数字信号,复制出与接收到的卫星信号一致的本地载波和本地伪码信号,从而实现对GNSS信号的捕获与跟踪,并从中获得GNSS伪距和载波相位观测量,以及解调出导航电文完成对数字信号的处理,具体包括以下几个功能模块:信号捕获、信号跟踪、码伪距及载波伪距测量、位同步及帧同步、u电文解码。
第八章 导航接收机变频链路特征
- 天线增益: 指在输入功率相等的条件下,实际天线与理想的辐射单元在空间同一点处所产生的场强的平方之比,即功率之比。
- 电压驻波比(VSWR):表征天线输入阻抗和馈线的特性阻抗匹配性能,入射波与从天线回来的反射波在馈线中叠加,形成驻波状态。馈线中的电压最大值与电压最小值的比值就是电压驻波比(驻波的波峰/波谷)。匹配的好坏还可以用反射系数(反射电压/入射电压)和回波损耗(输入功率/反射功率)来衡量。
- 方向图:度量天线各个方向收发信号能力的一个指标,通常以图形形式表示为功率强度与夹角的关系。天线的辐射是三维的,在工程上为了方便,常采用水平和垂直两个面的方向图来描述天线的方向性。
- 3dB波束宽度(半功率波束宽度):衡量天线的最大辐射区域的尖锐程度的物理量。通常取天线方向图主瓣两个半功率点之间的宽度。主瓣瓣宽越窄,则方向性越好,抗干扰能力越强。
- 前后比:方向图中,前后瓣最大功率之比。前后比越大,天线的后向辐射(或接收)越小。
- 副瓣电平:副瓣最大值模值与主瓣最大值模值之比。最靠近主瓣的第一个副瓣是所有副瓣中最大的,为衡量辐射功率集中于主瓣的程度,天线副瓣电平愈低,在这些方向上对杂散的来波抑制能力愈强,抗干扰能力就愈强。
- 有效接收面积:在天线的极化与来波极化完全匹配以及负载与天线阻抗共轭匹配的状态下,天线在某方向上接收并传输至负载的功率与入射的均匀平面波功率密度之比。
- 信噪比:信号功率与噪声功率的比值,用来衡量信号的质量,信噪比越高,质量越高;通常将噪声功率用一个大小相同的热噪声功率所对应的噪声温度来等价表示,与噪声带宽相关,不方便。
- 载噪比:信号功率与2倍的噪声频谱功率密度之比,与噪声带宽无关。
第九章 导航信号捕获方法
为什么需要捕获: 识别卫星(根据伪随机码PRN,但不是卫星编号,有映射关 系;GLONASS有所不同)、微弱信号提取(GPS信号比噪声低20dB)、伪随机码相位识别(1023个码相位,目前处于哪一个相位)、多普勒频率影响。
平均捕获时间:平均捕获时间:用来衡量信号捕获的快慢程度,指接收机开始 搜索到声明捕获首个卫星信号所需的平均时间(假定信号随机分布,平均搜索单元为总搜索单位的一半)。
首次定位时间(TTFF,Time to First Fix):用户设备开机至获 得首次正确定位所需的时间,它包括了对多颗卫星信号的捕获、跟踪、位同步、帧同步、数据解调、电文译码以及定位运算等 一系列过程。
捕获辅助三要素:历书、接收机位置、时间信息。
接收机关机信息存储(ROM/EPROM):关机前用户位置、速度、时间、日期;卫星星历(4小时有效);卫星历书(半年以上有效,所有卫星)。
重捕时间:用户设备在接收的导航信号短时失锁后,从信号恢复到 重新捕获导航信号所需的时间。
信号捕获:根据预先设定好的信号捕获搜索策略来直接控制与调 节载波NCO和码NCO,使它们复现出对应于某一搜索单元的载波和 CA码信号(粗略的);
信号跟踪:通过实时地鉴相,将所得的跟踪误差信息及时反馈给 载波NCO、码NCO,以精确复现出与当前接收信号一致的信号。 信号捕获实际运行在信号跟踪环路上,捕获阶段跟踪反馈环路打 开不闭合,跟踪阶段反馈环路闭合。
相干积分:通常采用积分-清除器来实现, 将I支路和Q支路上的信号分开来进行积分, 而不是将两者混合起来的积分方式;滤除高频分量。
非相关积分:将I支路和Q支路上的信号混合起来的积分方式。
相干积分优点:提高信噪比,而且与相关积分时间成正比,降低了环路中的数据率和所需运算量。
平方损耗:平方运算对强度越弱的信号,造成越大的平方损失。
第十章 导航信号跟踪
跟踪:从捕获状态出发,通过跟踪环对载波、码相位的精 确估计,可以解调出导航电文数据位,同时输出信号中的各种观测量;
载波跟踪环(载波环):使得接收机的本地复现载波与接收信号中的载波频率和相位一致; 相位锁定环路(锁相环) 频率锁定环路(锁频环)
伪码跟踪环(码环):使得接收机本地复现的伪码尽量与接收信号中的伪码对齐,即伪码频率和相位一致。
位同步每个导航电文bit持续20ms,只有找到bit的边沿,才能准确恢复数据码;
帧同步通过TLM中的同步码,寻找子帧边沿, 按照导航电文格式,构成30bit一个字, 最终解译出有使用价值的导航电文参数。
GPS导航电文结构 载波:f1=154*10.23e6,信号最底层, 承载了伪码和数据信号,具备测距功能; 伪码:fcode=10.23e6/10,承载了数据 ,具备测距功能; 数据:fdata=10.23e6/204600,携带了卫星钟差、卫星位置等信息。
第十一章 伪距测量误差分布特征
原子秒(1967~至今):原子秒是由原子振荡周期,即原子跃迁时发射或吸收电磁波的周期导出的时间基本单位。
世界时系统(universal time,UT):以平子夜作为0时开始的格林威治(英国伦敦南郊原格林尼治天文台的所在地,它又是世界上地理经度的起始点)平太阳时,就称为世界时。
原子时(TA):原子跃迁所辐射和吸收的电磁波频率具有极高的稳定性和可复现性,在此基础上建立的原子钟是世界上精度最高的时间系统, 目前使用的氢钟精度可达10-16;
国际原子时(TAI):根据全球约60个实验室中的大约240台自由运转的原子钟提供的数据进行处理,采用综合原子时算法,得出“国际时间标准”;高度精确、均匀的时间系统,与地球自转是否有关系?
协调世界时(UTC):1972年建立,世界时(UT)与国际原子时(TAI)的折衷方案,严格地以精确的TAI秒长为单位;当UTC与世界时UT1的差距超过0.9s时,协调时采用闰秒的方法加1秒或减1秒,使协调时在时刻上尽量接近世界时,时差保持在0.9s之内.
电离层延迟:电离层是高度位于50km~1000km之间的大气层;在太阳紫外线、X射线、γ射线和高能粒子等的作用下,电离层中的中性气体分子部分被电离,产生了大量的自由电子和正离子,从而形成了一个电离区域。GNSS卫星信号在穿过电离层时,其传播速度会发生变化,变化程度主要取决于电离层中的电子密度和信号频率。这种差异在天顶方向可达十几米,在高度角为5°时可超过50m,因而必须加以改正。对于扩频信号,理论证明存在群折射率和相折射率的不同,进而造成群速度和相速度的不同。
对流层延迟:对流层是高度为50km以下的未被电离的中性大气层。GNSS卫星发射的电磁波信号在大气中传播时会受到对流层的影响,最终导致传播速度减慢,传播路径发生弯曲。干分量一般指氧气与氮气等干空气,与大气压和绝对温度有关;湿分量指水蒸气,与水汽压和绝对温度有关。修正模型类似电离层:先获得天顶对流层时延,再通过倾斜率折算到传播防线。(干分量为主,天顶方向占总对流层时延的90%约2.3m;湿分量在天顶方向很小,约20cm左右)
相对论效应误差:在GNSS系统中,卫星相对于地面上的接收机在做高速运动,由此会产生相对论效应;是由卫星钟和接收机钟在惯性空间中的运动速度不同,以及这两台钟所处位置的地球引力位的不同而引起的。
卫星钟差:同一卫星的时钟偏差对不同的接收机来说是相同的,差分技术能全部消除时钟偏差;变化相当缓慢,大致1~2mm/s的速度变化。
卫星星历误差:很强的空间和时间相关性,比如:基线100km对应卫星张角0.3°,误差在传播路径上投影差别很小。
第十二章 定位方程解算方法
相对定位:一种通过在多个测站上进行同步观测,测定测站之间相对位置的卫星定位技术手段。
实时动态测量 real-time kinematic survey (RTK):GNSS相对定位技术的一种,主要通过基准站和流动站之间的实时数据链路和载波相对定位快速解算技术,实现高精度动态相对定位。
精密单点定位 precise point positioning:利用GNSS 接收机的载波相位观测值、精密星历和精密卫星钟差实现高精度定位的方式。
基线解算 baseline solution:在GNSS 相对定位中,通过数据处理得到基线向量的过程。解算结果通常包括两点间的坐标差和基线长度。
整周跳变:卫星信号中断或失锁,接收机计数器无法连续计数使整周计数不正确,但不到一整周的相位观测值仍是正确的。简称周跳。